Fault tolerant control of a permanent magnet synchronous machine using multiple constraints Takagi-Sugeno approach
DOI:
https://doi.org/10.20998/2074-272X.2022.6.04Keywords:
Takagi-Sugeno models, actuator saturation, state estimation, actuator faults diagnosis, fault tolerant control, permanent magnet synchronous machine model, linear matrix inequalitiesAbstract
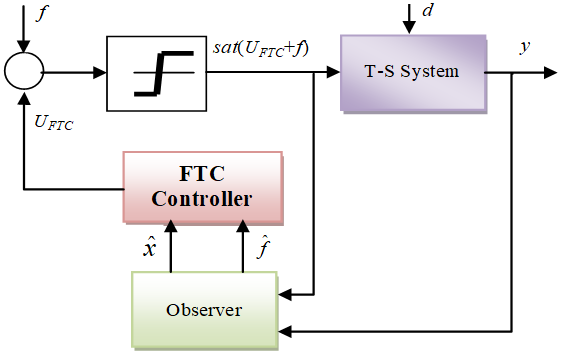
Introduction. Fault diagnosis, and fault tolerant control issues are becoming very important to ensure a good supervision of systems and guarantee the safety of human operators and equipments even if system complexity increases. Problem. In fact, the presence of faults in actuators, sensors and processes can lead to system performance degradation, system breakdown, economic loss, and even disastrous situations. Furthermore, Actuator saturation or control input saturation is probably the most usual nonlinearity encountered in control engineering because of the physical impossibility of applying unlimited control signals and/or safety constraints. Purpose. This article is dedicated to the problem of fault tolerant control for constrained nonlinear systems described by a Takagi-Sugeno model. One of the interests of this type of models is the possibility of extend some tools and methods from linear system case to the nonlinear one. The novelty of the work consists in developing a fault tolerant control algorithm for a nonlinear Permanent Magnet Synchronous Machine model using an observer based state-feedback control technique in order to enhance fault and state estimation despite actuator saturation and system disturbances. Methods. Indeed a sensor fault detection observer based residual generator is synthesized with a guaranteed L2 performance to attenuate the external disturbances effect from one side and to maximize the residual sensitivity to faults from the other side. Based on Lyapunov function, design conditions are formulated in terms of Linear Matrix Inequalities to ensure stability of the global system. Practical value. A detailed study concerning nonlinear permanent magnet synchronous machine model, which is consolidated by simulation results, is conducted to show the used algorithm’s effectiveness guarantying fault estimation and reconfiguration of the control law to maintain stable performance even in the presence of actuator faults, external perturbation and the phenomenon of actuator saturation.
References
Ichalal D., Marx B., Ragot J., Mammar S., Maquin D. Sensor fault tolerant control of nonlinear Takagi-Sugeno systems. Application to vehicle lateral dynamics. International Journal of Robust and Nonlinear Control, 2016, vol. 26, no. 7, pp. 1376-1394. doi: https://doi.org/10.1002/rnc.3355.
Ichalal D., Marx B., Ragot J., Maquin D. Observer based actuator fault tolerant control for nonlinear Takagi-Sugeno systems : an LMI approach. 18th Mediterranean Conference on Control and Automation, MED’10, 2010, pp. 1278-1283. doi: https://doi.org/10.1109/MED.2010.5547874.
Ichalal D., Marx B., Maquin D., Ragot J. New fault tolerant control strategy for nonlinear systems with multiple model approach. 2010 Conference on Control and Fault-Tolerant Systems (SysTol), 2010, pp. 606-611. doi: https://doi.org/10.1109/SYSTOL.2010.5675951.
Zuo Z., Ho D.W.C., Wang Y. Fault tolerant control for singular systems with actuator saturation and nonlinear perturbation. Automatica, 2010, vol. 46, no. 3, pp. 569-576. doi: https://doi.org/10.1016/j.automatica.2010.01.024.
Dang Q.V., Vermeiren L., Dequidt A., Dambrine M. LMI approach for robust stabilization of Takagi–Sugeno descriptor systems with input saturation. IMA Journal of Mathematical Control and Information, 2018, vol. 35, no. 4, pp. 1103-1114. doi: https://doi.org/10.1093/imamci/dnx019.
Bernstein D.S., Michel A.N. A chronological bibliography on saturating actuators. International Journal of Robust and Nonlinear Control, 1995, vol. 5, no. 5, pp. 375-380. doi: https://doi.org/10.1002/rnc.4590050502.
Takagi T., Sugeno M. Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics, 1985, vol. SMC-15, no. 1, pp. 116-132. doi: https://doi.org/10.1109/TSMC.1985.6313399.
Tanaka K., Wang H.O. Fuzzy Control Systems Design and Analysis. John Wiley & Sons, Inc. 2001. 302 p. doi: https://doi.org/10.1002/0471224596.
Tarbouriech S., Garcia G., Gomes da Silva J.M., Queinnec I. Stability and Stabilization of Linear Systems with Saturating Actuators. Springer London, 2011. 430 p. doi: https://doi.org/10.1007/978-0-85729-941-3.
Boyd S., El Ghaoui L., Feron E., Balakrishnan V. Linear Matrix Inequalities in System and Control Theory. Society for Industrial and Applied Mathematics, 1994. 185 p. doi: https://doi.org/10.1137/1.9781611970777.
Aouaouda S., Chadli M., Cocquempot V., Tarek Khadir M. Multi-objective H − ∕ H ∞ fault detection observer design for Takagi-Sugeno fuzzy systems with unmeasurable premise variables: descriptor approach. International Journal of Adaptive Control and Signal Processing, 2013, vol. 27, no. 12, pp. 1031-1047. doi: https://doi.org/10.1002/acs.2374.
Bouarar T., Marx B., Maquin D., Ragot J. Trajectory tracking fault tolerant controller design for Takagi-Sugeno systems subject to actuator faults. 2011 International Conference on Communications, Computing and Control Applications (CCCA), 2011, pp. 1-6. doi: https://doi.org/10.1109/CCCA.2011.6031484.
Benzaouia A., El Hajjaji A., Hmamed A., Oubah R. Fault tolerant saturated control for T–S fuzzy discrete-time systems with delays. Nonlinear Analysis: Hybrid Systems, 2015, vol. 18, pp. 60-71. doi: https://doi.org/10.1016/j.nahs.2015.06.003.
Nguyen A., Dequidt A., Dambrine M. Anti-windup based dynamic output feedback controller design with performance consideration for constrained Takagi–Sugeno systems. Engineering Applications of Artificial Intelligence, 2015, vol. 40, pp. 76-83. doi: https://doi.org/10.1016/j.engappai.2015.01.005.
Nguyen A.-T., Laurain T., Palhares R., Lauber J., Sentouh C., Popieul J.-C. LMI-based control synthesis of constrained Takagi–Sugeno fuzzy systems subject to L2 or L∞ disturbances. Neurocomputing, 2016, vol. 207, pp. 793-804. doi: https://doi.org/10.1016/j.neucom.2016.05.063.
Nguyen A.-T., Sentouh C., Popieul J.-C. Fuzzy steering control for autonomous vehicles under actuator saturation: Design and experiments. Journal of the Franklin Institute, 2018, vol. 355, no. 18, pp. 9374-9395. doi: https://doi.org/10.1016/j.jfranklin.2017.11.027.
Bezzaoucha S., Marx B., Maquin D., Ragot J. State and output feedback control for Takagi-Sugeno systems with saturated actuators. International Journal of Adaptive Control and Signal Processing, 2016, vol. 30, no. 6, pp. 888-905. doi: https://doi.org/10.1002/acs.2649.
Saifia D., Chadli M., Karimi H.R., Labiod S. Fuzzy control for Electric Power Steering System with assist motor current input constraints. Journal of the Franklin Institute, 2015, vol. 352, no. 2, pp. 562-576. doi: https://doi.org/10.1016/j.jfranklin.2014.05.007.
Saifia D., Chadli M., Labiod S., Guerra T.M. Robust H ∞ static output feedback stabilization of T-S fuzzy systems subject to actuator saturation. International Journal of Control, Automation and Systems, 2012, vol. 10, no. 3, pp. 613-622. doi: https://doi.org/10.1007/s12555-012-0319-3.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2022 L. Moussaoui, S. Aouaouda, R. Rouaibia

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
Authors who publish with this journal agree to the following terms:
1. Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work.




