Hybrid extended Kalman filter long short-term memory framework for robust state and fault estimation in mobile robots under unknown disturbances
DOI:
https://doi.org/10.20998/2074-272X.2026.3.08Keywords:
mobile robotics, fault-tolerant localization, extended Kalman filter, long short-term memory, hybrid estimation, unknown disturbancesAbstract
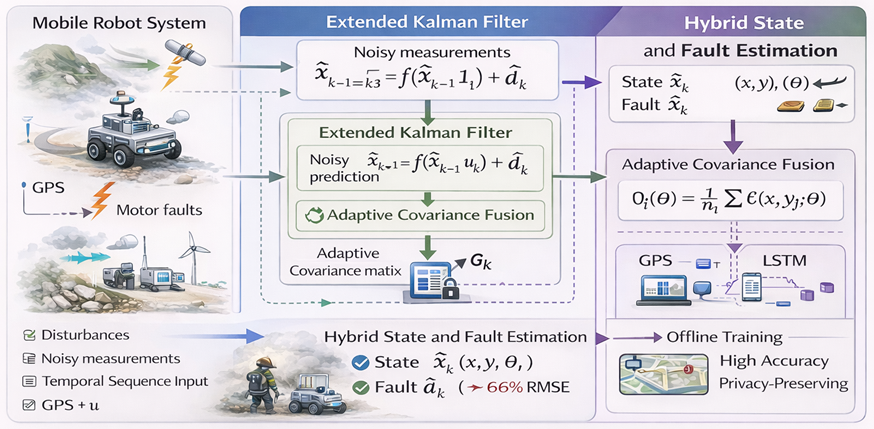
Introduction. Reliable and accurate state estimation plays a central role in mobile robotics, ensuring effective localization, navigation, and control in uncertain and dynamic environments. Traditional estimation methods such as the extended Kalman filter (EKF) and the unscented Kalman filter (UKF) are widely used for nonlinear systems; however, their performance degrades when facing unknown disturbances or modeling inaccuracies. Problem. In real-world mobile robots, unexpected motor faults and unmeasured disturbances significantly reduce the estimation accuracy and may lead to mission failure. Classical EKF and UKF approaches rely on static models and Gaussian noise assumptions, which make them unsuitable for systems affected by unknown or time-varying uncertainties. The goal of this work is to design and validate a hybrid extended Kalman filter long short-term memory (EKF–LSTM) framework capable of achieving joint state and fault estimation for mobile robots operating under unknown disturbances. Methodology. The proposed approach combines a model-based EKF with an offline-trained LSTM neural network. The EKF performs nonlinear state estimation using physical robot dynamics and noisy Global Positioning System (GPS) measurements, while the LSTM predicts additive motor faults based on temporal data. The LSTM outputs are incorporated into the EKF as pseudo-measurements with adaptive covariance tuning, ensuring stability and robustness. Results. Simulation results demonstrate that the hybrid EKF–LSTM reduces trajectory root mean square error (RMSE) by 4.6 % and fault RMSE by 68 % compared to a standalone EKF, and by more than 50 % compared to the UKF. The framework effectively tracks abrupt fault variations and remains resilient to unknown inputs and sensor noise. Scientific novelty. Unlike existing hybrid filters, the proposed method introduces adaptive covariance fusion between EKF and LSTM estimators, enabling reliable operation under directional dynamics and unmodeled disturbances. Practical value. The proposed hybrid EKF–LSTM framework enhances fault-tolerant localization for autonomous robots, providing a scalable solution for real-time applications such as search-and-rescue operations, industrial automation, and autonomous navigation in noisy or GPS-denied environments. References 33, tables 2, figures 5.
References
Shafiezadeh A., Bhatt N.P., Hashemi E. LiDAR-Based Navigation Using Normal Distributions Transform Filter. 2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), 2024, pp. 4046-4051. doi: https://doi.org/10.1109/ITSC58415.2024.10920042.
Chakraborty S., Verma A., Hartman A. Evaluation of Visual Inertial Navigation System for Autonomous Robot Tours on Campus. 2024 IEEE 3rd International Conference on Computing and Machine Intelligence (ICMI), 2024, pp. 1-7. doi: https://doi.org/10.1109/ICMI60790.2024.10585838.
Fekrmandi H., Frye A.J., Tamjidi A., Rakoczy J., Hoover R.C. Autonomous Multi-agent Systems Using SVGS Camera Sensor for Lunar Surface Mobility Applications. 2021 IEEE Aerospace Conference (50100), 2021, pp. 1-10. doi: https://doi.org/10.1109/AERO50100.2021.9438414.
Ceccarelli N., Di Marco M., Garulli A., Giannitrapani A., Vicino A. Set Membership Localization and Map Building for Mobile Robots. Systems and Control: Foundations and Applications, 2006, pp. 289-308. doi: https://doi.org/10.1007/0-8176-4470-9_16.
Li Y., Xu X. The Application of EKF and UKF to the SINS/GPS Integrated Navigation Systems. 2010 2nd International Conference on Information Engineering and Computer Science, 2010, pp. 1-5. doi: https://doi.org/10.1109/ICIECS.2010.5678253.
Kumar S.D., Dyanesh S., Madhushree K., Madhuram M. Advanced Condition Monitoring and Fault Detection in AC Motors using Machine Learning Techniques. 2025 7th International Conference on Intelligent Sustainable Systems (ICISS), 2025, pp. 748-754. doi: https://doi.org/10.1109/ICISS63372.2025.11076243.
Geng K., Chulin N.A., Wang Z. Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle. Sensors, 2020, vol. 20, no. 15, art. no. 4245. doi: https://doi.org/10.3390/s20154245.
Schneider J.-N., Gorißen L., Kaster T., Walderich P., Hinke C. LSTM-based Inverse Dynamics Learning for Franka Emika Robot. 2024 International Conference on Control, Automation and Diagnosis (ICCAD), 2024, pp. 1-6. doi: https://doi.org/10.1109/ICCAD60883.2024.10553865.
Davari N., Veloso B., Costa G. de A., Pereira P.M., Ribeiro R.P., Gama J. A Survey on Data-Driven Predictive Maintenance for the Railway Industry. Sensors, 2021, vol. 21, no. 17, art. no. 5739. doi: https://doi.org/10.3390/s21175739.
Van der Merwe R., Wan E.A., Julier S.J. Sigma-Point Kalman Filters for Nonlinear Estimation and Sensor-Fusion. AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004. pp. 1–30.
Ding L., Wen C. High-Order Extended Kalman Filter for State Estimation of Nonlinear Systems. Symmetry, 2024, vol. 16, no. 5, art. no. 617. doi: https://doi.org/10.3390/sym16050617.
Alsaggaf A.U., Saberi M., Berry T., Ebeigbe D. Nonlinear Kalman Filtering in the Absence of Direct Functional Relationships Between Measurement and State. IEEE Control Systems Letters, 2024, vol. 8, pp. 2865-2870. doi: https://doi.org/10.1109/LCSYS.2024.3514818.
Yin S., Li P., Gu X., Yang X., Yu L. Adaptive Kalman filter with LSTM network assistance for abnormal measurements. Measurement Science and Technology, 2024, vol. 35, no. 7, art. no. 075113. doi: https://doi.org/10.1088/1361-6501/ad404f.
Liu X., Hu Y., Konstantinou C., Jin Y. CHIMERA: A Hybrid Estimation Approach to Limit the Effects of False Data Injection Attacks. 2021 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), 2021, pp. 95-101. doi: https://doi.org/10.1109/SmartGridComm51999.2021.9632000.
Cohen N., Klein I. Inertial Navigation Meets Deep Learning: A Survey of Current Trends and Future Directions. Results in Engineering, 2024, vol. 24, art. no. 103565. doi: https://doi.org/10.1016/j.rineng.2024.103565.
Abed K., Zine H.K.E. Intelligent fuzzy back-stepping observer design based induction motor robust nonlinear sensorless control. Electrical Engineering & Electromechanics, 2024, no. 2, pp. 10-15. doi: https://doi.org/10.20998/2074-272X.2024.2.02.
Sadeghzadeh-Nokhodberiz N., Poshtan J. Distributed Interacting Multiple Filters for Fault Diagnosis of Navigation Sensors in a Robotic System. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, vol. 47, no. 7, pp. 1383-1393. doi: https://doi.org/10.1109/TSMC.2016.2598782.
Moussaoui L., Aouaouda S., Rouaibia R. Fault tolerant control of a permanent magnet synchronous machine using multiple constraints Takagi-Sugeno approach. Electrical Engineering & Electromechanics, 2022, no. 6, pp. 22-27. doi: https://doi.org/10.20998/2074-272X.2022.6.04.
Aghili F., Su C.-Y. Robust Relative Navigation by Integration of ICP and Adaptive Kalman Filter Using Laser Scanner and IMU. IEEE/ASME Transactions on Mechatronics, 2016, vol. 21, no. 4, pp. 2015-2026. doi: https://doi.org/10.1109/TMECH.2016.2547905.
Oonk S., Maldonado F.J., Li Z., Reichard K., Pentzer J. Extended kalman filter for improved navigation with fault awareness. 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2014, pp. 2681-2686. doi: https://doi.org/10.1109/SMC.2014.6974332.
Eichstädt S., Makarava N., Elster C. On the evaluation of uncertainties for state estimation with the Kalman filter. Measurement Science and Technology, 2016, vol. 27, no. 12, art. no. 125009. doi: https://doi.org/10.1088/0957-0233/27/12/125009.
Xu H., Zhao J., Zhang H., Jiang J., Chen L. Target Tracking Method Based on LSTM-EKF. Lecture Notes in Electrical Engineering, 2024, vol. 1206 LNEE, pp. 60-67. doi: https://doi.org/10.1007/978-981-97-3332-3_6.
Bengharbi A.A., Laribi S., Allaoui T., Mimouni A. Photovoltaic system faults diagnosis using discrete wavelet transform based artificial neural networks. Electrical Engineering & Electromechanics, 2022, no. 6, pp. 42-47. doi: https://doi.org/10.20998/2074-272X.2022.6.07.
Hochreiter S., Schmidhuber J. Long Short-Term Memory. Neural Computation, 1997, vol. 9, no. 8, pp. 1735-1780. doi: https://doi.org/10.1162/neco.1997.9.8.1735.
Wagstaff B., Kelly J. LSTM-Based Zero-Velocity Detection for Robust Inertial Navigation. 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2018, pp. 1-8. doi: https://doi.org/10.1109/IPIN.2018.8533770.
Khemiri K., Najari M., Ferhi M., Djebali R., Bjaoui M. Enhancing State of Charge Estimation for Lithium-Ion Batteries in Noisy Environments Using a Hybrid LSTM-EKF Mode. 2025 15th International Renewable Energy Congress (IREC), 2025, pp. 1-4. doi: https://doi.org/10.1109/IREC64614.2025.10926811.
Khemiri K., Najari M., Ferhi M., Djebali R., Bjaoui M. Analyzing Series Resistance Effects on PV Characteristics and Estimation Using LSTM-EKF. 2025 15th International Renewable Energy Congress (IREC), 2025, pp. 1-4. doi: https://doi.org/10.1109/IREC64614.2025.10926737.
Yu B., Wang G., Zhu E., Yao S., Zhou Y. Predicting lithium-ion battery state of charge with long short-term memory network enhanced extended Kalman filter. Journal of Energy Storage, 2025, vol. 132, art. no. 117849. doi: https://doi.org/10.1016/j.est.2025.117849.
Xu C., Zhao H., Xie H., Gao B. Multisensor Decision-Level Fusion Network Based on Attention Mechanism for Object Detection. IEEE Sensors Journal, 2024, vol. 24, no. 19, pp. 31466-31480. doi: https://doi.org/10.1109/JSEN.2024.3442951.
Lin X., Chao S., Yan D., Guo L., Liu Y., Li L. Multi-Sensor Data Fusion Method Based on Self-Attention Mechanism. Applied Sciences, 2023, vol. 13, no. 21, art. no. 11992. doi: https://doi.org/10.3390/app132111992.
Yue J., Lang J., Feng R. An adaptive feature fusion strategy using dual-layer attention and multi-modal deep reinforcement learning for all-media similarity search. Discover Artificial Intelligence, 2025, vol. 5, no. 1, art. no. 71. doi: https://doi.org/10.1007/s44163-025-00332-7-7.
Najdi B., Benbrahim M., Kabbaj M.N. Bearing Fault Diagnosis with a Hybrid CWT-ResNet-LSTM Model. Lecture Notes in Networks and Systems, 2024, vol. 1101 LNNS, pp. 454-463. doi: https://doi.org/10.1007/978-3-031-68675-7_43.
Khemiri K., Ferhi M., Hidouri N., Ennetta R., Djebali R. Robust State and Fault Estimation in Mobile Robots under Dynamic Noise Environments using Hybrid LSTM-EKF with Adaptive Weighting. Journal of Applied and Computational Mechanics, 2025, (In press). doi: https://doi.org/10.22055/jacm.2025.48393.5203.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 K. Khemiri, R. Djebali

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
Authors who publish with this journal agree to the following terms:
1. Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work.