Advanced control of twin rotor multi-input multi-output systems using seagull optimization for linear quadratic regulator tuning
DOI:
https://doi.org/10.20998/2074-272X.2026.1.05Keywords:
seagull optimization algorithm, linear quadratic regulator, twin rotor multi-input multi-output system, parameter tuning, control performanceAbstract
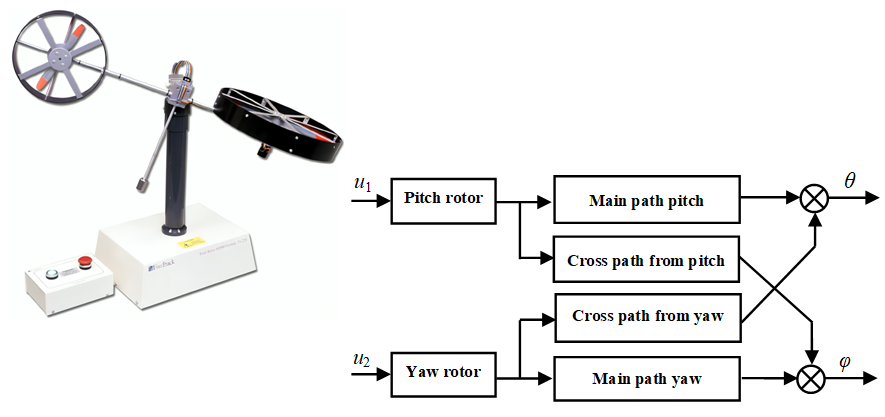
Introduction. During the past decade, advanced control of complex multi-input multi-output (MIMO) systems has been a sustained focus owing to their growing use in aerospace and robotic platforms. The twin rotor MIMO system (TRMS) serves as a helicopter-like benchmark system for testing advanced control techniques. Its nonlinear behavior and significant cross-coupling render it difficult to control using traditional methods. Problem. The TRMS features strong nonlinear dynamics and cross-coupling effects that challenge conventional control methods. Manual tuning of control parameters often results in suboptimal performance and reduced robustness. The goal of this study is to optimize the linear quadratic regulator (LQR) weighting matrices Q and R for the TRMS using the seagull optimization algorithm (SOA) to improve transient performance, minimize overshoot, and accelerate stabilization in both pitch and yaw compared to classical LQR tuning. Methodology. The new approach integrates the SOA with LQR control theory. The SOA determines the best values of Q and R matrices by minimizing a cost function defined by system performance metrics. SOA-optimized LQR is evaluated through simulations and contrasted with the classical LQR under identical conditions. Population size is 50 agents with a maximum of 100 iterations to achieve convergence. Results. Simulation results show that the SOA-optimized LQR has a remarkable improvement in the system’s time response. In comparison to the classical LQR, these results provide a shorter settling time from 7.35 s to 5.34 s (≈28 %), decreases overshoot (≈3 % vs. 30 % open loop), increases damping, and reduces oscillations. The pitch and yaw angle responses across several control schemes clearly demonstrate the superior performance of the proposed optimization technique. Scientific novelty. This work demonstrates, for the first time, the use of SOA for optimal tuning of LQR in a TRMS benchmark. It opens new avenues to enhance the performance of high-order nonlinear systems, pointing toward more accurate and stable control techniques in industrial and aerospace engineering fields. Practical value. The technique provides an efficient method to enhance the functionality of complex nonlinear systems without requiring manual tuning, and it has potential applications in the industrial and aerospace areas. References 38, tables 3, figures 4.
References
Milovanovic M.B., Antic D.S., Milojkovic M.T., Spasic M.D. Adaptive Control of Nonlinear MIMO System With Orthogonal Endocrine Intelligent Controller. IEEE Transactions on Cybernetics, 2022, vol. 52, no. 2, pp. 1221-1232. doi: https://doi.org/10.1109/TCYB.2020.2998505.
Cao C., Huang X., Cao W., Wang H., Yang Y., Xu J. MIMO Control of a Twin Rotor Aerodynamical System (TRAS). 2025 9th International Conference on Robotics, Control and Automation (ICRCA), 2025, pp. 265-269. doi: https://doi.org/10.1109/ICRCA64997.2025.11011049.
Ebirim K.U., Horri N.M., Prempain E. A 2DoF Twin Rotor MIMO System for Teaching and Research. IFAC-PapersOnLine, 2024, vol. 58, no. 16, pp. 6-11. doi: https://doi.org/10.1016/j.ifacol.2024.08.453.
Danh H.D., Van C.N., Van Q.V. Tracking Iterative Learning Control of TRMS using Feedback Linearization Model with Input Disturbance. Journal of Robotics and Control (JRC), 2025, vol. 6, no. 1, pp. 446-455. doi: https://doi.org/10.18196/jrc.v6i1.25579.
Han S.-Y., Zhang C.-Y. ASMAC: An Adaptive Slot Access MAC Protocol in Distributed VANET. Electronics, 2022, vol. 11, no. 7, art. no. 1145. doi: https://doi.org/10.3390/electronics11071145.
Dutta L., Das D.K. Nonlinear Disturbance Observer Based Adaptive Explicit Nonlinear Model Predictive Control Design for a Class of Nonlinear MIMO System. IEEE Transactions on Aerospace and Electronic Systems, 2022, vol. 59, no. 2, pp. 1965-1979. doi: https://doi.org/10.1109/TAES.2022.3211252.
Shah A.Q., Awais M., Zafar M., Ahmed A., Mudassar M., Muneer M., Saif M., Razzaq A., Jang S.-H., Kim S., Park Y. A comparative study of linear control strategies on the aerodynamics twin rotor system. Journal of Mechanical Science and Technology, 2023, vol. 37, no. 8, pp. 4301-4310. doi: https://doi.org/10.1007/s12206-023-0746-5.
Bilal H., Yin B., Aslam M.S., Anjum Z., Rohra A., Wang Y. A practical study of active disturbance rejection control for rotary flexible joint robot manipulator. Soft Computing, 2023, vol. 27, no. 8, pp. 4987-5001. doi: https://doi.org/10.1007/s00500-023-08026-x.
Faisal R.F., Abdulwahhab O.W. Design of an Adaptive Linear Quadratic Regulator for a Twin Rotor Aerodynamic System. Journal of Control, Automation and Electrical Systems, 2021, vol. 32, no. 2, pp. 404-415. doi: https://doi.org/10.1007/s40313-020-00682-w.
Fahmizal, Nugroho H.A., Cahyadi A.I., Ardiyanto I. Twin Rotor MIMO System Control using Linear Quadratic Regulator with Simechanics. 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE), 2021, pp. 301-306. doi: https://doi.org/10.1109/ICEEIE52663.2021.9616893.
Ranjan K.V., Laxmi V. Design of an Optimal Controller for a Twin Rotor Mimo System (TRMS). 2022 International Conference on Sustainable Computing and Data Communication Systems (ICSCDS), 2022, pp. 950-959. doi: https://doi.org/10.1109/ICSCDS53736.2022.9760778.
Darsouni Z., Rezgui S.E., Benalla H., Rebahi F., Boumendjel M.A.M. Ensuring service continuity in electric vehicles with vector control and linear quadratic regulator for dual star induction motors. Electrical Engineering & Electromechanics, 2025, no. 2, pp. 24-30. doi: https://doi.org/10.20998/2074-272X.2025.2.04.
Latreche K., Taleb R., Bentaallah A., Toubal Maamar A.E., Helaimi M., Chabni F. Design and experimental implementation of voltage control scheme using the coefficient diagram method based PID controller for two-level boost converter with photovoltaic system. Electrical Engineering & Electromechanics, 2024, no. 1, pp. 3-9. doi: https://doi.org/10.20998/2074-272X.2024.1.01.
Alnaib I.I., Alsammak A.N. Optimization of fractional PI controller parameters for enhanced induction motor speed control via indirect field-oriented control. Electrical Engineering & Electromechanics, 2025, no. 1, pp. 3-7. doi: https://doi.org/10.20998/2074-272X.2025.1.01.
Boudia A., Messalti S., Zeghlache S., Harrag A. Type-2 fuzzy logic controller-based maximum power point tracking for photovoltaic system. Electrical Engineering & Electromechanics, 2025, no. 1, pp. 16-22. doi: https://doi.org/10.20998/2074-272X.2025.1.03.
Khemis A., Boutabba T., Drid S. Model reference adaptive system speed estimator based on type-1 and type-2 fuzzy logic sensorless control of electrical vehicle with electrical differential. Electrical Engineering & Electromechanics, 2023, no. 4, pp. 19-25. doi: https://doi.org/10.20998/2074-272X.2023.4.03.
Kadri K., Boudjema F., Bouzid Y., Ouahab B., Draris H.I. A linear Active Disturbance Rejection Control based PSO to control Twin Rotor MIMO System with experimental validation. 2023 International Conference on Electrical Engineering and Advanced Technology (ICEEAT), 2023, pp. 1-7. doi: https://doi.org/10.1109/ICEEAT60471.2023.10425852.
Sivadasan J., Shiney J.R.J. Modified nondominated sorting genetic algorithm-based multiobjective optimization of a cross-coupled nonlinear PID controller for a Twin Rotor System. Journal of Engineering and Applied Science, 2023, vol. 70, no. 1, art. no. 133. doi: https://doi.org/10.1186/s44147-023-00305-6.
Cabuker A.C., Almali M.N., Parlar I. Evaluation of controller parameters on the twin rotor multiple input multiple output system using butterfly-based particle swarm optimization. Journal of Scientific Reports-A, 2023, no. 052, pp. 174-189. doi: https://doi.org/10.59313/jsr-a.1198441.
Çelebi B., Bilgiç B. Optimizing TRMS stability: a multi-objective genetic algorithm approach to PID controller design. Engineering Computations, 2025, vol. 42, no. 2, pp. 710-721. doi: https://doi.org/10.1108/EC-06-2024-0476.
Al-Talabi A., Fahad T.O., Mohammed A.A., Mary A.H. Inverse modeling, analysis and control of twin rotor aerodynamic systems with optimized artificial intelligent controllers. PLOS One, 2025, vol. 20, no. 5, art. no. e0322999. doi: https://doi.org/10.1371/journal.pone.0322999.
Gopmandal F., Ghosh A. LQR-based MIMO PID control of a 2-DOF helicopter system with uncertain cross-coupled gain. IFAC-PapersOnLine, 2022, vol. 55, no. 22, pp. 183-188. doi: https://doi.org/10.1016/j.ifacol.2023.03.031.
Aidoud M., Feliu-Batlle V., Sebbagh A., Sedraoui M. Small signal model designing and robust decentralized tilt integral derivative TID controller synthesizing for twin rotor MIMO system. International Journal of Dynamics and Control, 2022, vol. 10, no. 5, pp. 1657-1673. doi: https://doi.org/10.1007/s40435-022-00916-6.
Sajjad Moosapour S., Mehdipour H., Keramatzadeh M. Sliding Mode Disturbance Observer-Based Control of a Laboratory Twin Rotor Multi Input-Multi Output System. IEEE Access, 2025, vol. 13, pp. 394-406. doi: https://doi.org/10.1109/ACCESS.2024.3523850.
Tran A.-M.D., Vu T.V. Robust MIMO LQR Control with Integral Action for Differential Drive Robots: A Lyapunov-Cost Function Approach. Engineering, Technology & Applied Science Research, 2025, vol. 15, no. 4, pp. 24775-24781. doi: https://doi.org/10.48084/etasr.11583.
Dehnavi V.S., Shafiee M. LQR for Generalized Systems Using Metaheuristic Algorithms Based on Disturbance Observer. 2020 28th Iranian Conference on Electrical Engineering (ICEE), 2020, pp. 1-5. doi: https://doi.org/10.1109/ICEE50131.2020.9260723.
Zeghlache S., Benyettou L., Djerioui A., Ghellab M.Z. Twin Rotor MIMO System Experimental Validation of Robust Adaptive Fuzzy Control Against Wind Effects. IEEE Systems Journal, 2022, vol. 16, no. 1, pp. 409-419. doi: https://doi.org/10.1109/JSYST.2020.3034993.
Ezekiel D.M., Samikannu R., Matsebe O. Pitch and Yaw Angular Motions (Rotations) Control of the 1-DOF and 2-DOF TRMS: A Survey. Archives of Computational Methods in Engineering, 2021, vol. 28, no. 3, pp. 1449-1458. doi: https://doi.org/10.1007/s11831-020-09423-3.
Senoussaoui A., Chenafa M., Sahraoui A., Kacimi A., Houcine R. LQGi/LTR controller with integrators and feedforward controller applied to a Twin Rotor MIMO System. Przeglad Elektrotechniczny, 2021, vol. 97, no. 4, pp. 48-53. doi: https://doi.org/10.15199/48.2021.04.08.
Faisal R.F., Abdulwahhab O.W. Design of an Adaptive Linear Quadratic Regulator for a Twin Rotor Aerodynamic System. Journal of Control, Automation and Electrical Systems, 2021, vol. 32, no. 2, pp. 404-415. doi: https://doi.org/10.1007/s40313-020-00682-w.
Nekrouf S., Chekroun S. Optimal controller design for a birotor helicopter. Przegląd Elektrotechniczny, 2021, vol. 97, no. 11, pp. 93-96. doi: https://doi.org/10.15199/48.2021.11.16.
Kumar V., Kumar D., Kaur M., Singh D., Idris S.A., Alshazly H. A Novel Binary Seagull Optimizer and its Application to Feature Selection Problem. IEEE Access, 2021, vol. 9, pp. 103481-103496. doi: https://doi.org/10.1109/ACCESS.2021.3098642.
Jiang H., Yang Y., Ping W., Dong Y. A Novel Hybrid Classification Method Based on the Opposition-Based Seagull Optimization Algorithm. IEEE Access, 2020, vol. 8, pp. 100778-100790. doi: https://doi.org/10.1109/ACCESS.2020.2997791.
Hanif M., Mohammad N., Biswas K., Harun B. Seagull Optimization Algorithm for Solving Economic Load Dispatch Problem. 2023 International Conference on Electrical, Computer and Communication Engineering (ECCE), 2023, pp. 1-6. doi: https://doi.org/10.1109/ECCE57851.2023.10101516.
Hou P., Liu J., Ni F., Zhang L. Hybrid Strategies Based Seagull Optimization Algorithm for Solving Engineering Design Problems. International Journal of Computational Intelligence Systems, 2024, vol. 17, no. 1, art. no. 62. doi: https://doi.org/10.1007/s44196-024-00439-2.
Ragab M., Alshehri S., Alhakamy N.A., Alsaggaf W., Alhadrami H.A., Alyami J. Machine Learning with Quantum Seagull Optimization Model for COVID-19 Chest X-Ray Image Classification. Journal of Healthcare Engineering, 2022, vol. 2022, art. no. 6074538. doi: https://doi.org/10.1155/2022/6074538.
Wang J., Li Y., Hu G. Hybrid seagull optimization algorithm and its engineering application integrating Yin–Yang Pair idea. Engineering with Computers, 2022, vol. 38, no. 3, pp. 2821-2857. doi: https://doi.org/10.1007/s00366-021-01508-2.
Aribowo W., Muslim S., Achmad F., Hermawan A.C. Improving Neural Network Based on Seagull Optimization Algorithm for Controlling DC Motor. Jurnal Elektronika Dan Telekomunikasi, 2021, vol. 21, no. 1, pp. 48-54. doi: https://doi.org/10.14203/jet.v21.48-54.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 H. Mostefaoui, S. Tahraoui, M. Souaihia, R. Taleb, M. Mostefaoui

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
Authors who publish with this journal agree to the following terms:
1. Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work.




